由南韓許多機構組成的研究團隊開發出一種小巧柔軟的機械手,它可以抓握迷你大小的物體並測量物體的溫度。研究團隊將這個科學機器人的研究成果發表在《Science Robotics》雜誌上。
隨著機器人性能的日趨越益,科學家也一直在尋找新的使用方法,在這項新的努力道路上,研究人員為自己設定了一個目標,即是要創造一種可以握住和操縱微小物體又同時不會破壞它們的機械手。為此,研究人員創造了一個有五個手指形狀、負責抓握的手。每根手指的長度剛好超過半厘米,寬度是人類頭髮的八倍。機械手的肌肉由形狀記憶聚合物(shape memory polymer)製成以賦予控制能力,當通電時聚合物會改變形狀,然後在斷電時反彈。研究人員還在每個手指中放置了微型傳感器來偵測熱量、振動和壓力並測試其功能。
研究人員發現他們的小機械手既溫柔又強壯,例如,它可以打開小瓶子,但另一方面又足夠溫和,可以拾起和擺弄鮭魚卵。他們還發現它可以拿起比預期重得多的東西,這隻小手重 25.4 毫克,但能夠拾起重達 30 克的物體。另外,這隻手能提供少量熱量以保持蝸牛卵的溫暖,並握住這個卵夠長的時間以使其孵化,一旦小蝸牛出生,團隊就用小手測量牠的心率。它還可以用來抓住活體豬隻的血管,而不會阻斷血流或造成瘀傷。團隊認為持續改進該設計,有朝一日可以讓醫生使用它來操縱人體組織——例如,將受精卵固定在子宮壁上。
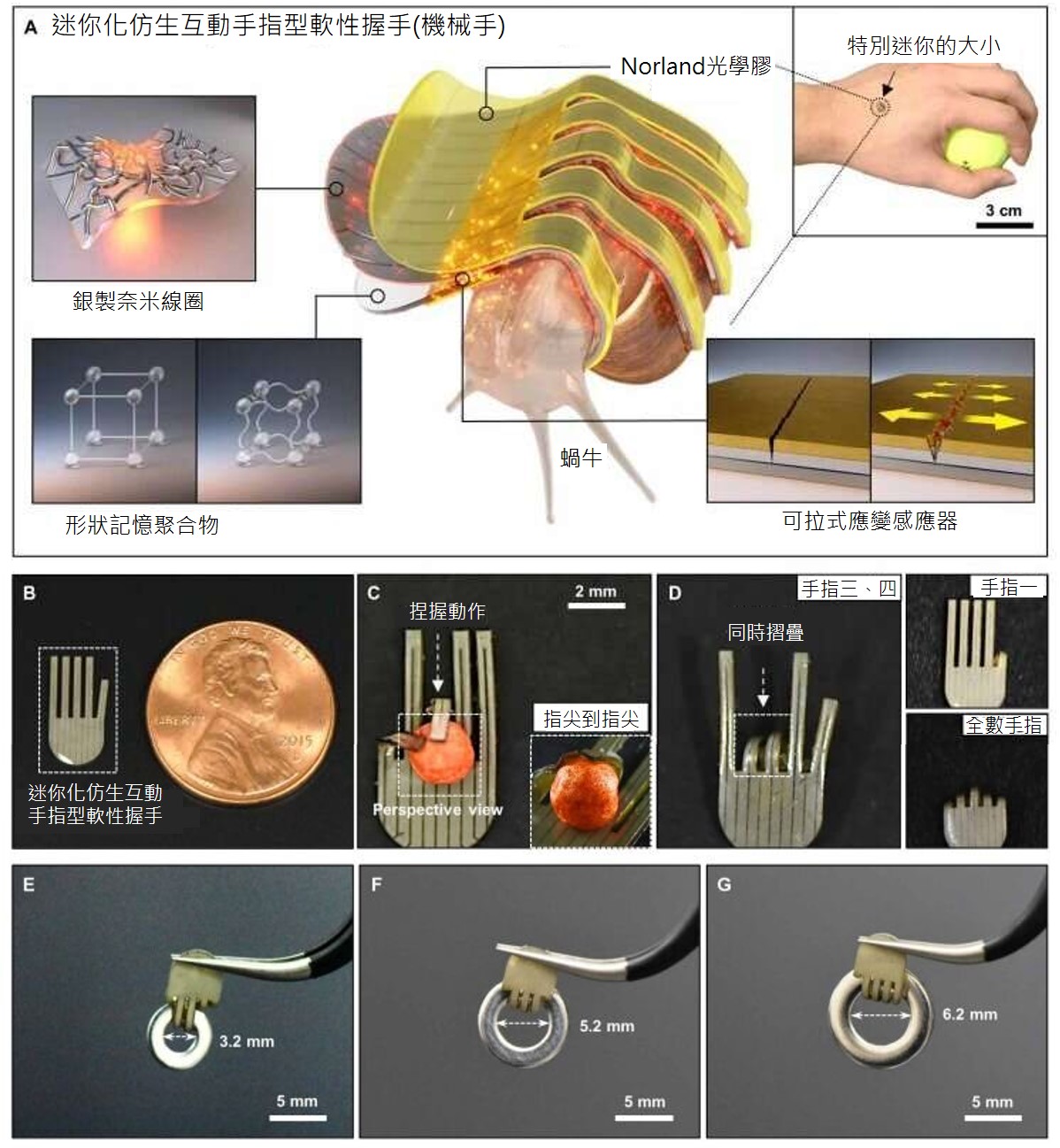
※ 迷你化仿生互動手指型軟性握手(機械手)的示意圖和圖像。
(A) 用於測量生物體生物訊號具有可變硬度的迷你級軟夾器的示意圖。
(B 到 D) 迷你級軟性握手的照片,使用拇指和中指進行指尖到指尖的抓握,以及針對不同手指位置的選擇性折疊。
(E 到 G) 軟性握手根據物體大小使用手指選擇性地夾住物體。
(圖片來源: Science Robotics (2021). DOI: 10.1126/scirobotics.abi6774)
(來源:TechExplore 生策中心編譯)
-
追蹤我們 ▎
-

-

Copyright © 2012 - 2024 Research Center for Biotechnology and Medicine Policy (RBMP). All Rights Reserved
