※聖塔克拉拉大學、紐澤西理工學院和香港大學成功透過深度強化學習,幫助微型機器人學習更複雜的游泳模式 (Photo credit: Santa Clara University/New Jersey Institute of Technology/University of Hong Kong)
聖塔克拉拉大學(Santa Clara University)、紐澤西理工學院(New Jersey Institute of Technology)和香港大學近日發表一項共同研究,成功透過深度強化學習(deep reinforcement learning)幫助微型機器人學習游泳,在該領域的研究上取得一大進展。
研究人員一直希望能開發像細菌等微生物在生物體中能自然航行的微型游泳機器人。這種機器人對未來許多生物醫學的應用提供了希望,如針對性的藥物輸送和顯微手術。然而,到目前為止,大多數人工微型油擁機器人只能以固定的運動模式進行相對簡單的動作。
這篇發表於《Communications Physics》的研究中,研究人員推斷微型游泳機器人可以透過人工智慧學習,並適應不斷變化的條件。就像人類學習游泳需要強化學習和回饋,以便在不斷變化的條件下保持漂浮和向不同方向前進,儘管在物理學上這會帶來一系列的挑戰。
聖塔克拉拉大學機械工程系副教授On Shun Pak表示:「能夠在微生物的規模上游泳本身就是一項具有挑戰性的任務。當你想讓一個微型游泳機器人執行更複雜的動作時,他們的運動模式設計很快就會變得非常棘手。」
透過結合人工神經網路與強化學習,該團隊成功使一個簡單的微型游泳機器人任意移動。當機器人以特定的方式移動時,就會收到特定動作的回饋,並者根據與周圍環境互動的經驗,逐步學習如何游泳
香港大學機械工程系助理教授Alan Tsang說:「就像人類學習如何游泳,微型游泳機器人學習如何移動其三個微粒子和延伸的連結,以自我前進和轉向。」
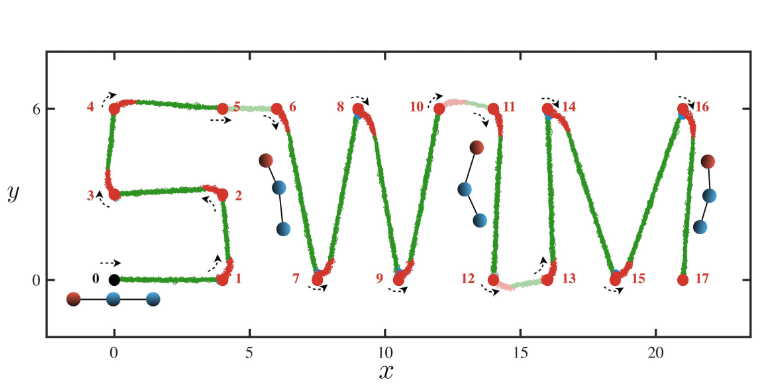
這種人工智慧的游泳機器人能夠在不同的運動模式間自我調整,以自行前進到任何目標位置。
研究人員表示,它可以在沒有明確程式設計的情況下遵循一個複雜的路徑。他們還展現出該機器人在外部流體流動擾動下的強大導航性能。
紐澤西理工學院數學科學教授Yuan-nan Young表示:「這是我們在開發微型游泳機器人方面邁出的第一步,這些機器人可以像生物細胞一樣適應複雜環境的自主導航。」
這種適應性行為對於人工微型游泳機器人在具有不可控和不可預測的環境因素中,可以對未來生物醫學應用提供重要的關鍵。
賓州大學微型機器人和生物物理學專家Arnold Mathijssen表示:「這項工作說明如何利用人工智慧的快速發展來解決流體動力學中的未解決挑戰。這項工作中機器學習和微型游泳機器人的整合將進一步推動這兩個研究領域間的發展。」
(來源:ScienceDaily 生策中心編譯)
-
追蹤我們 ▎
-

-

Copyright © 2012 - 2024 Research Center for Biotechnology and Medicine Policy (RBMP). All Rights Reserved
